Create a virtual 2D cross section.
createCrossSection(
gobject,
spat_unit = NULL,
spat_loc_name = "raw",
name = "cross_section",
spatial_network_name = "Delaunay_network",
thickness_unit = c("cell", "natural"),
slice_thickness = 2,
cell_distance_estimate_method = "mean",
extend_ratio = 0.2,
method = c("equation", "3 points", "point and norm vector",
"point and two plane vectors"),
equation = NULL,
point1 = NULL,
point2 = NULL,
point3 = NULL,
normVector = NULL,
planeVector1 = NULL,
planeVector2 = NULL,
mesh_grid_n = 20,
return_gobject = TRUE,
verbose = NULL
)Arguments
- gobject
giotto object
- spat_unit
spatial unit (e.g. "cell")
- spat_loc_name
name of spatial locations
- name
name of cress section object. (default = cross_sectino)
- spatial_network_name
name of spatial network object. (default = Delaunay_network)
- thickness_unit
unit of the virtual section thickness. If "cell", average size of the observed cells is used as length unit. If "natural", the unit of cell location coordinates is used. (default = cell)
- slice_thickness
thickness of slice. default = 2
- cell_distance_estimate_method
method to estimate average distance between neighobring cells. (default = mean)
- extend_ratio
deciding the span of the cross section meshgrid, as a ratio of extension compared to the borders of the vitural tissue section. (default = 0.2)
- method
method to define the cross section plane. If `"equation"`, the plane is defined by a four element numerical vector (equation) in the form of c(A,B,C,D), corresponding to a plane with equation Ax+By+Cz=D. If 3 points, the plane is define by the coordinates of 3 points, as given by point1, point2, and point3. If point and norm vector, the plane is defined by the coordinates of one point (point1) in the plane and the coordinates of one norm vector (normVector) to the plane. If point and two plane vector, the plane is defined by the coordinates of one point (point1) in the plane and the coordinates of two vectors (planeVector1, planeVector2) in the plane. (default = equation)
- equation
equation required by method `"equation"`. Equations needs to be a numerical vector of length 4, in the form of c(A,B,C,D), which defines plane Ax+By+Cz=D.
- point1
coordinates of the first point required by method "3 points","point and norm vector", and "point and two plane vectors".
- point2
coordinates of the second point required by method "3 points"
- point3
coordinates of the third point required by method "3 points"
- normVector
coordinates of the norm vector required by method "point and norm vector"
- planeVector1
coordinates of the first plane vector required by method "point and two plane vectors"
- planeVector2
coordinates of the second plane vector required by method "point and two plane vectors"
- mesh_grid_n
numer of meshgrid lines to generate along both directions for the cross section plane.
- return_gobject
logical. Whether to return giotto object (default = TRUE)
- verbose
be verbose
Value
if `return_gobject = TRUE` `giotto` with updated spatial network containing cross section information. Otherwise returns the cross section.
Details
Creates a virtual 2D cross section object for a given spatial network object. The users need to provide the definition of the cross section plane (see method).
Examples
g <- GiottoData::loadGiottoMini("starmap")
#> 1. read Giotto object
#> 2. read Giotto feature information
#> 3. read Giotto spatial information
#> 4. read Giotto image information
#> python already initialized in this session
#> active environment : '/usr/bin/python3'
#> python version : 3.12
g <- createCrossSection(
gobject = g,
method = "equation",
equation = c(0, 1, 0, 600),
extend_ratio = 0.6,
name = "new_cs",
return_gobject = TRUE
)
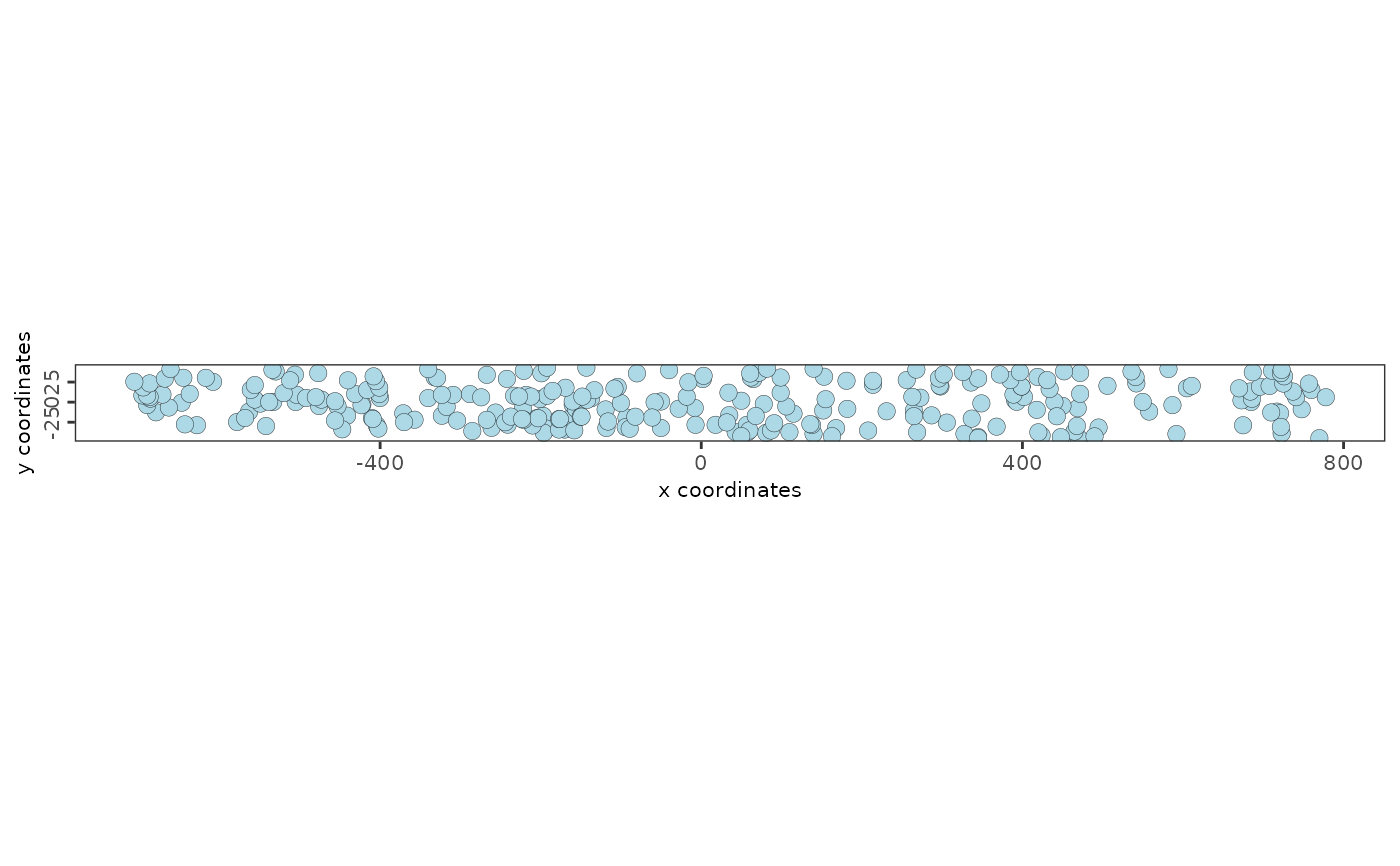
crossSectionPlot(g, name = "new_cs")